已实现的功能简述及运行简要说明
功能简述
对输入的一张彩色图像,自己写代码实现Harris Corner检测算法,显示中间的处理结果及最终的检测结果,包括最大特征值图,最小特征值图,R图(可以考虑彩色展示),原图上叠加检测结果等,并将这些中间结果都输出成图像文件。
运行简要说明
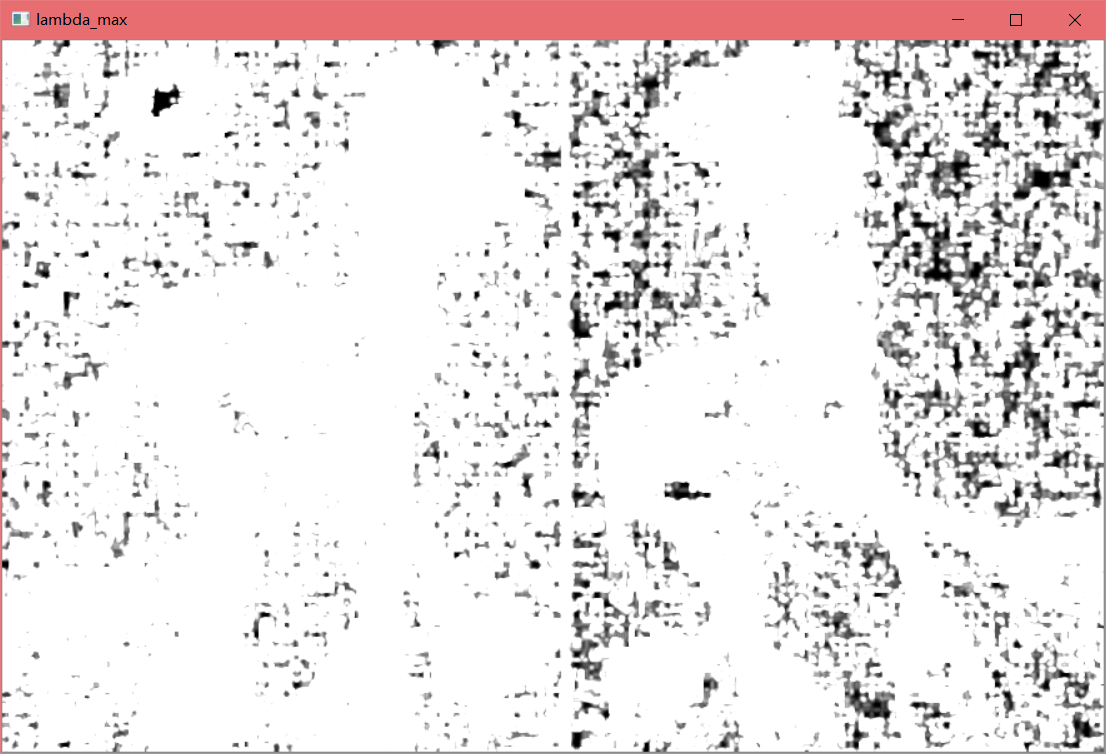
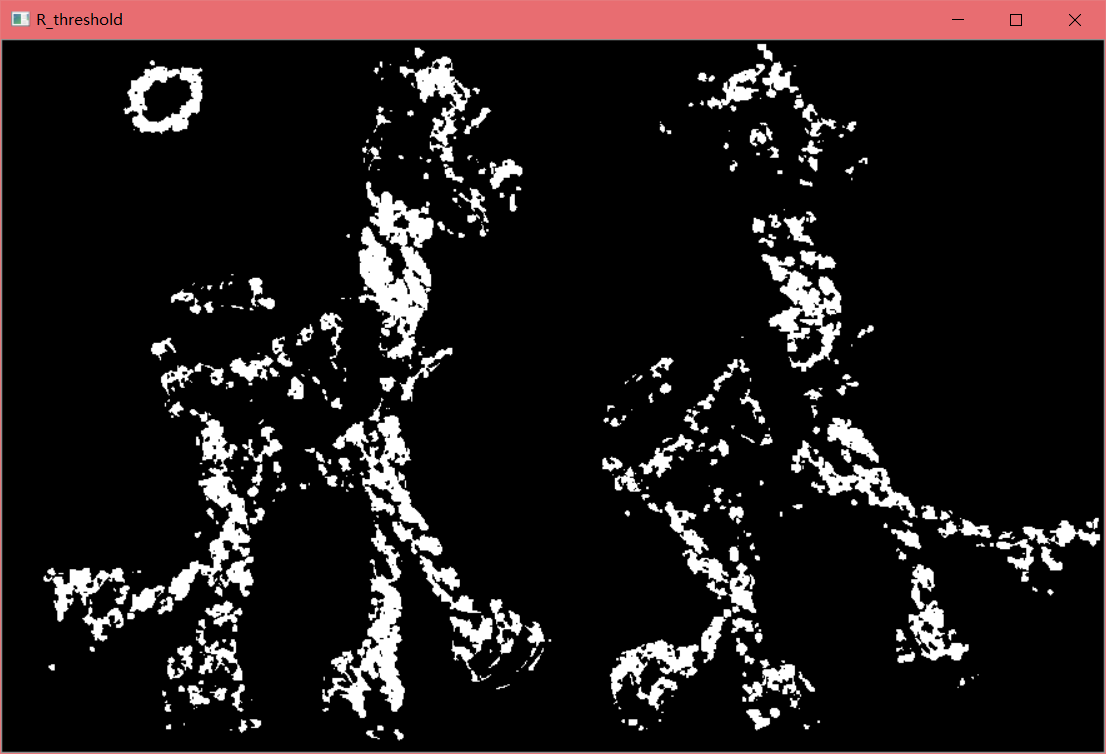
原始图像位置在img_path变量中存储,将在origin窗口中进行显示;最大特征值图在lambda_max窗口中显示,在相同目录下存储为lambda_max.jpg;最小特征值图在lambda_min窗口中进行显示,在相同目录下存储为lambda_min.jpg;R图在R窗口中显示,在相同目录下存储为R.jpg;设置threshold之后的R图在R_threshold窗口中显示,存储为R_threshold.jpg;局部极大值点图在local_max窗口中显示,存储为local_max.jpg;原图叠加显示结果在cover窗口中显示,并存储为cover.jpg。
开发与运行环境
操作系统:Windows 10,64位
开发环境:Python 3.7.3
库环境:numpy 1.16.4, cv2 4.1.1
算法基本思路、原理
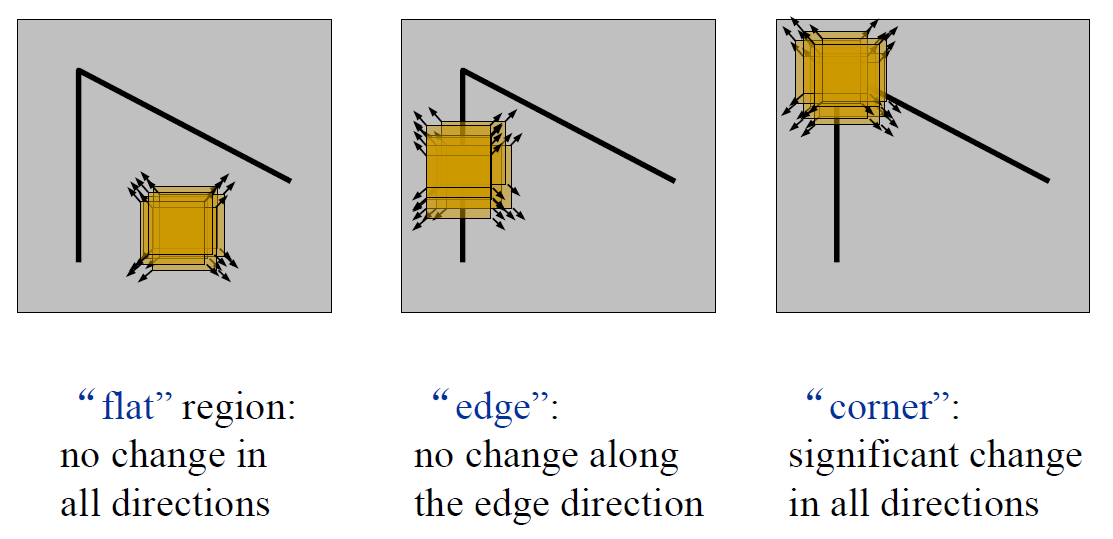
角点检测的基本思想是,使用一个固定窗口在图像上进行任意方向上的滑动,比较滑动前与滑动后两种情况,窗口中的像素灰度变化程度,如果存在任意方向上的滑动,都有着较大灰度变化,那么我们可以认为该窗口中存在角点。
当窗口发生[u,v]移动时,那么滑动前与滑动后对应的窗口中的像素点灰度变化描述如下:
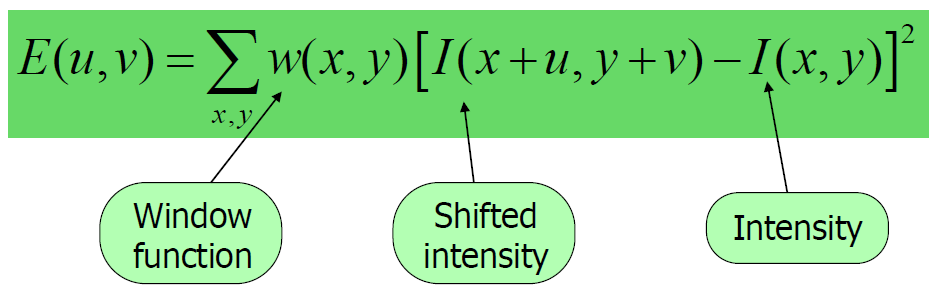
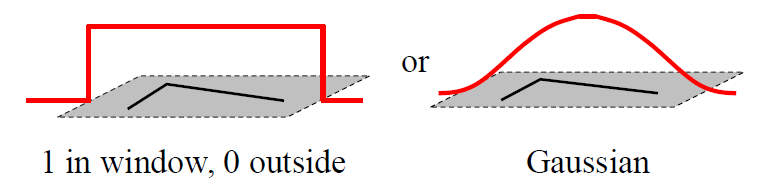
其中$[u,v]$是窗口的偏移量,$(x,y)$是窗口内所对应的像素坐标位置,窗口有多大,就有多少个位置。$w(x,y)$是窗口函数,有以下两种表示方法,最简单情形就是窗口内的所有像素所对应的w权重系数均为1。但有时候,我们会将$w(x,y)$函数设定为以窗口中心为原点的二元正态分布或高斯分布。如图所示:
根据上述表达式,当窗口处在平坦区域上滑动,可以想象的到,灰度不会发生变化,那么E(u,v) = 0;如果窗口处在比纹理比较丰富的区域上滑动,那么灰度变化会很大。算法最终思想就是计算灰度发生较大变化时所对应的位置,当然这个较大是指针任意方向上的滑动,并非单指某个方向。
我们对$E(w,v)$表达式进行泰勒展开,结果如下:
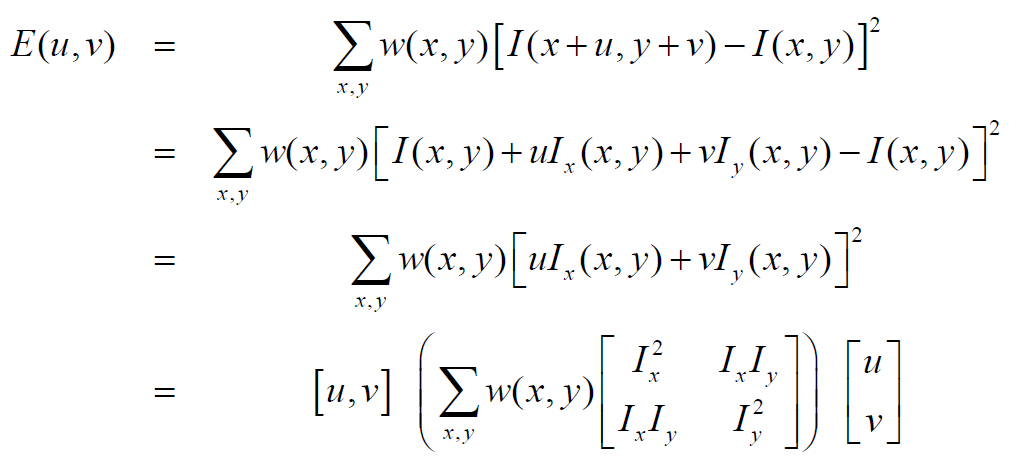
可以将$E(u,v)$表达式更新为:
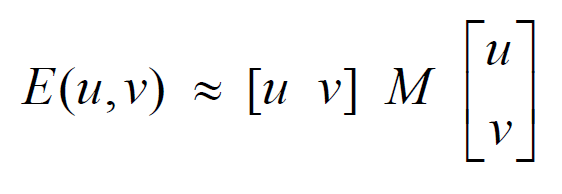
其中
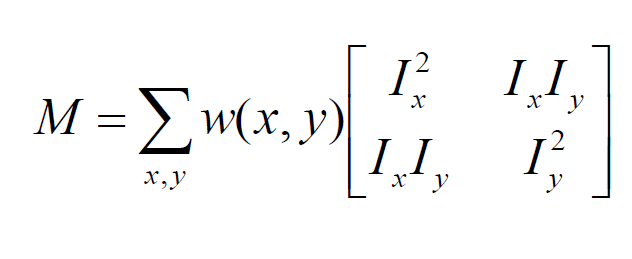
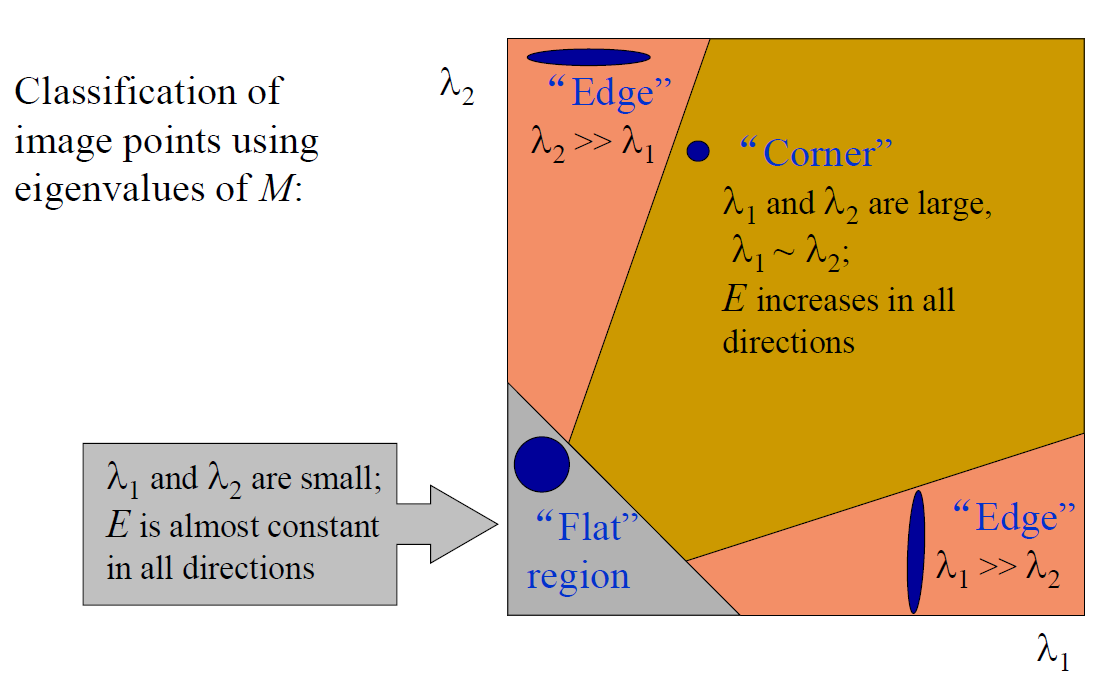
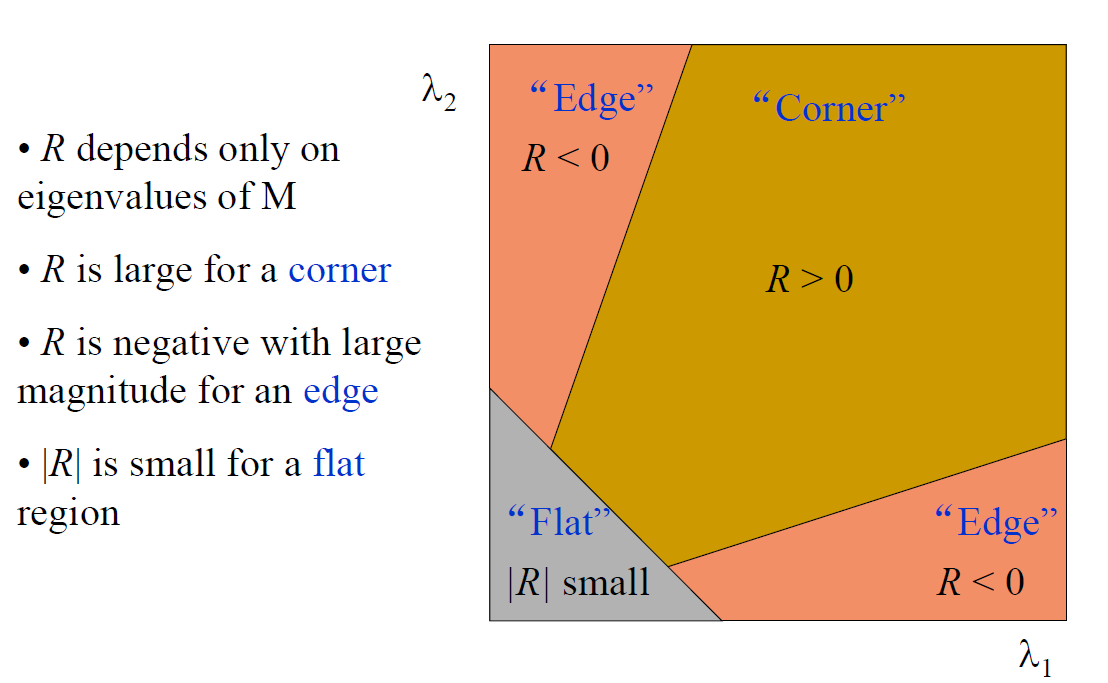
求解M的两个特征值$\lambda_1$和$\lambda_2$,可以根据两个特征值直接的关系得出对应像素点的位置信息(边缘or角点or平坦区域)
corner:在水平、竖直两个方向上变化均较大的点,即Ix、Iy都较大;
edge :仅在水平、或者仅在竖直方向有较大的点,即Ix和Iy只有其一较大 ;
flat : 在水平、竖直方向的变化量均较小的点,即Ix、Iy都较小;
可以定义角点响应函数R来表示:
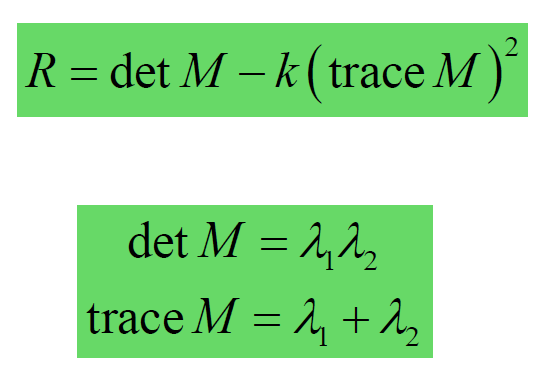
其中k是介于0.04-0.06间的常数。
针对三种不同区域的点,R的取值情况如下:
corner:R为大数值整数
edge:R为大数值负数
flat:绝对值R是小数值
具体实现
梯度计算
计算各像素点位置的x、y方向梯度值及梯度方向,实现方式如下:
1 | for i in range(width-1): |
M矩阵构建及计算
根据原理中的公式,对前一步计算得到的x、y方向梯度值进行计算,得到 $I_X^2$ 、$I_Y^2$ 和 $I_{XY}$,并进行高斯滤波,减少噪声带来的影响。
1 | ixx = cv2.GaussianBlur(ix*ix, (5,5), 1.4) #ix^2 |
计算M的行列式、迹、特征值
1 | detM = ixx * iyy - ixy * ixy #行列式 |
角点响应函数
计算角点响应函数,并进行处理,过滤掉R值小于0(即平坦区域的点)
1 | R = detM - k * traceM**2 |
设置阈值,去除边缘点,只保留角点
1 | threshold = np.max(R) / 100000 |
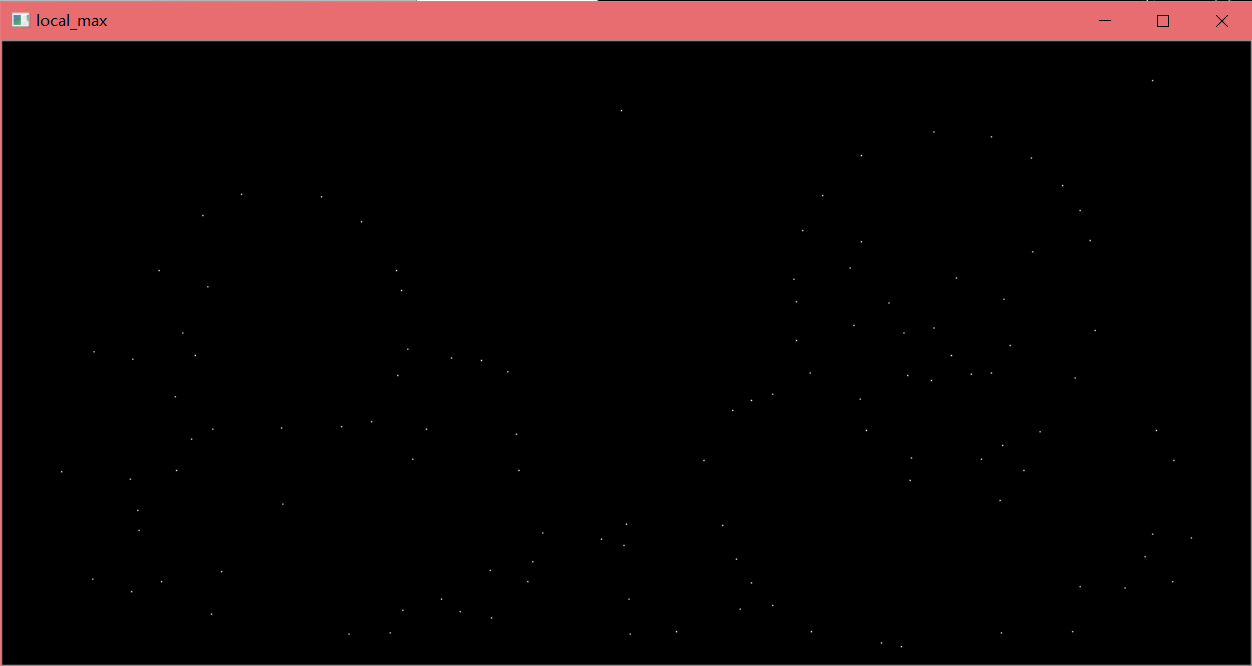
局部极大值
在之前选择的角点中进一步进行筛选,只保留局部极大值点
1 | for i in range(15, width-15): |
叠加显示
在原图上叠加显示角点检测结果
1 | for i in range(15,width-15): |
实验结果与分析
课件样例
先对课件中的样例进行测试,结果如下:
最大特征值图
最小特征值图

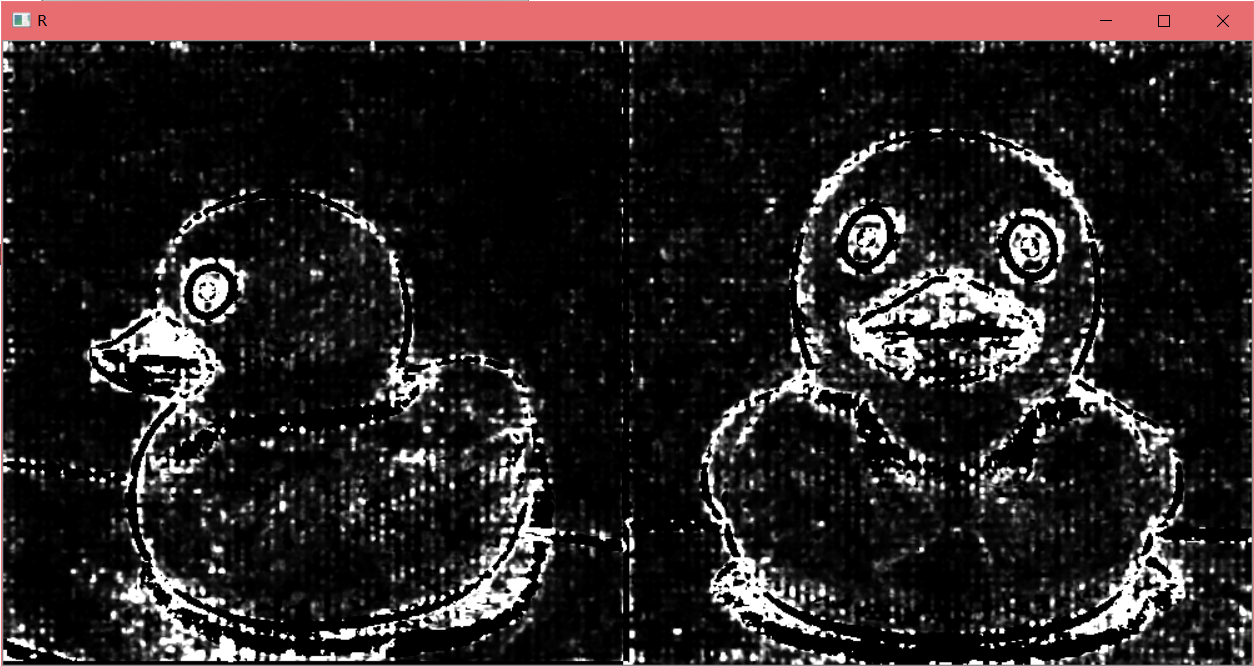
R图
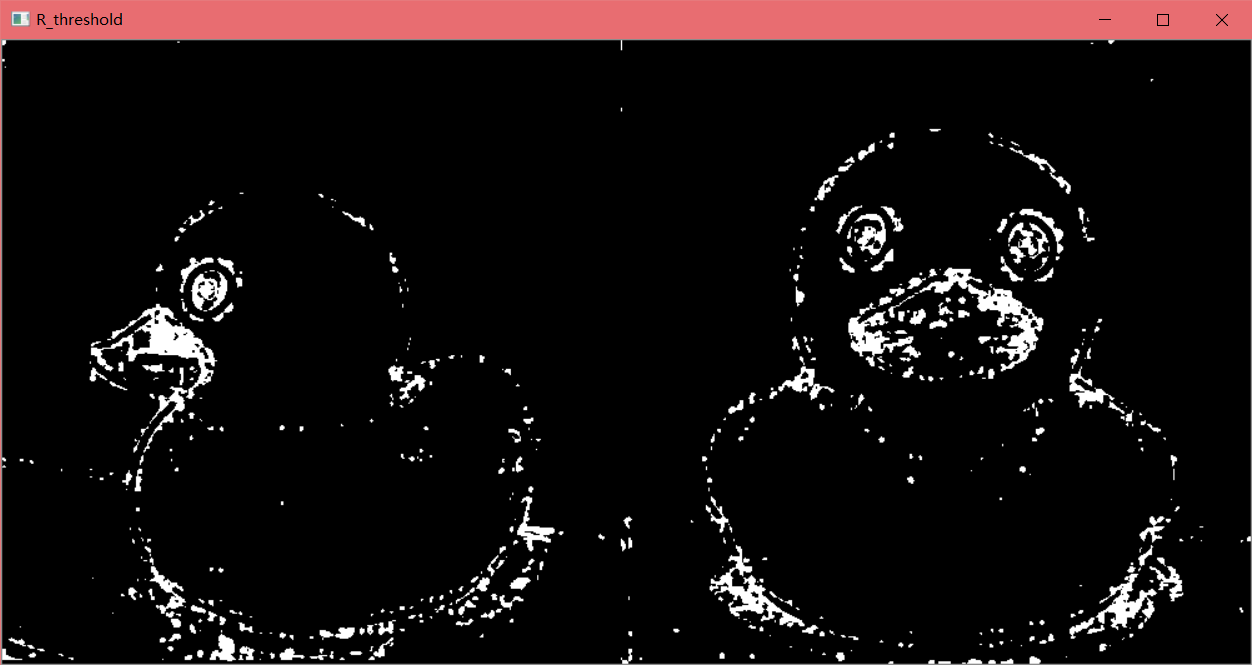
设置阈值前:

设置阈值后:
局部极大值
原图叠加显示

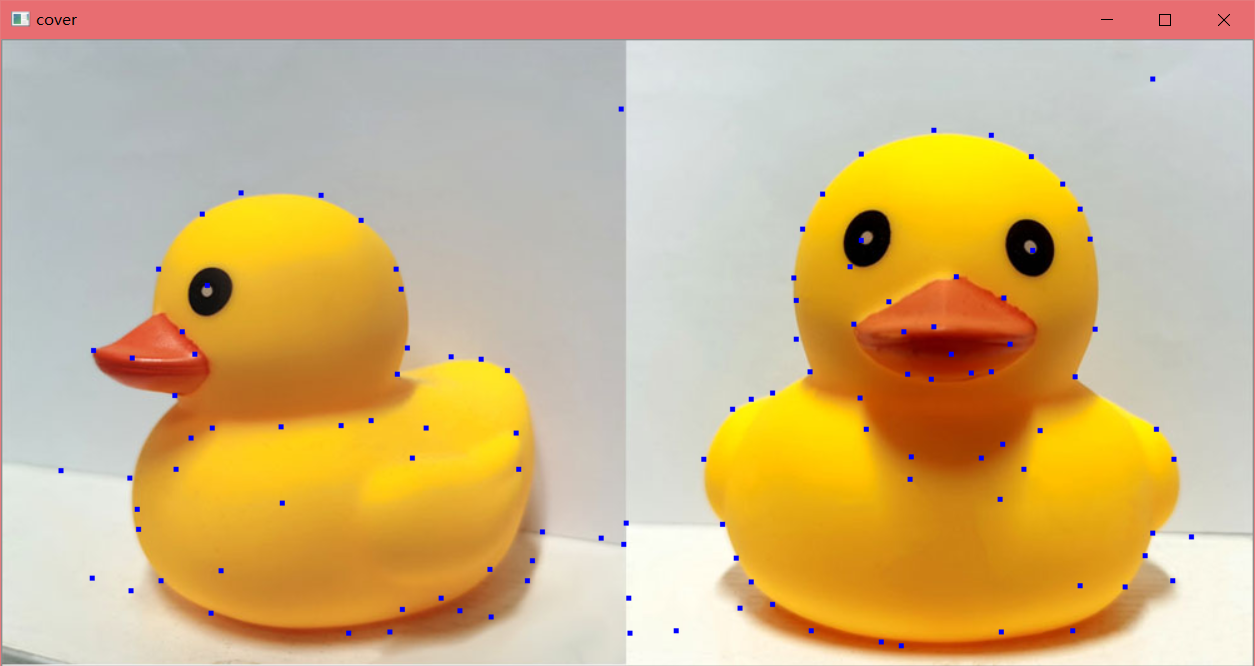
其他测试图
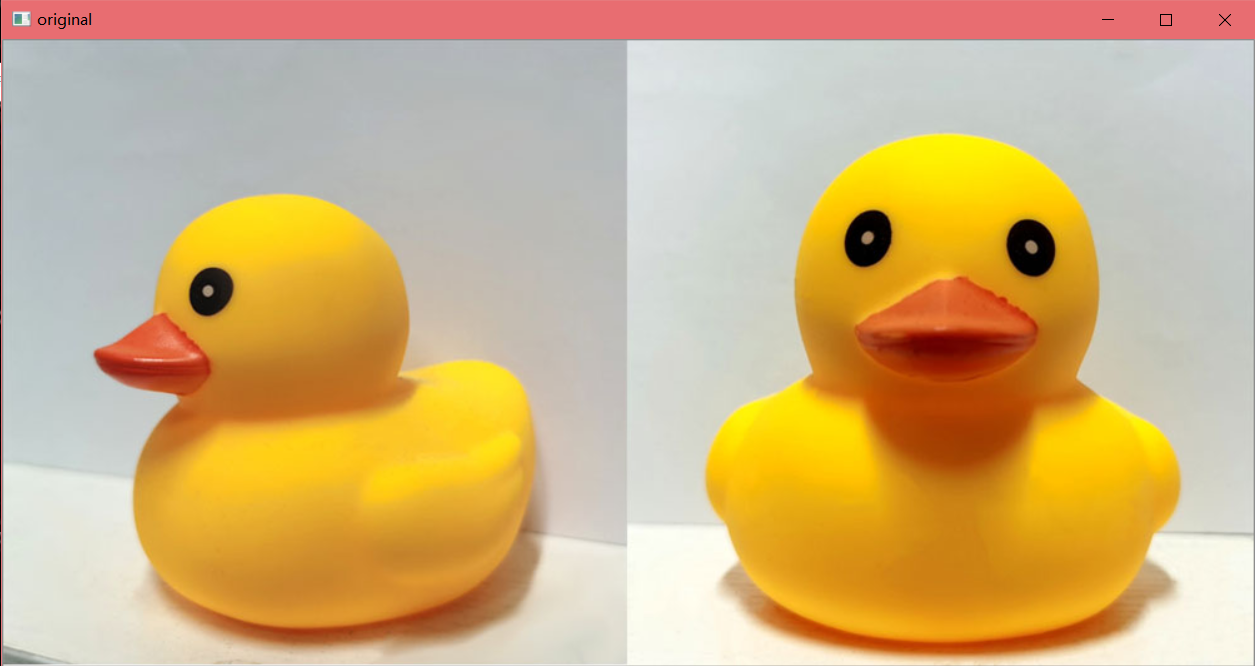
自己拍摄图片进行检测,结果如下:
原始图像:
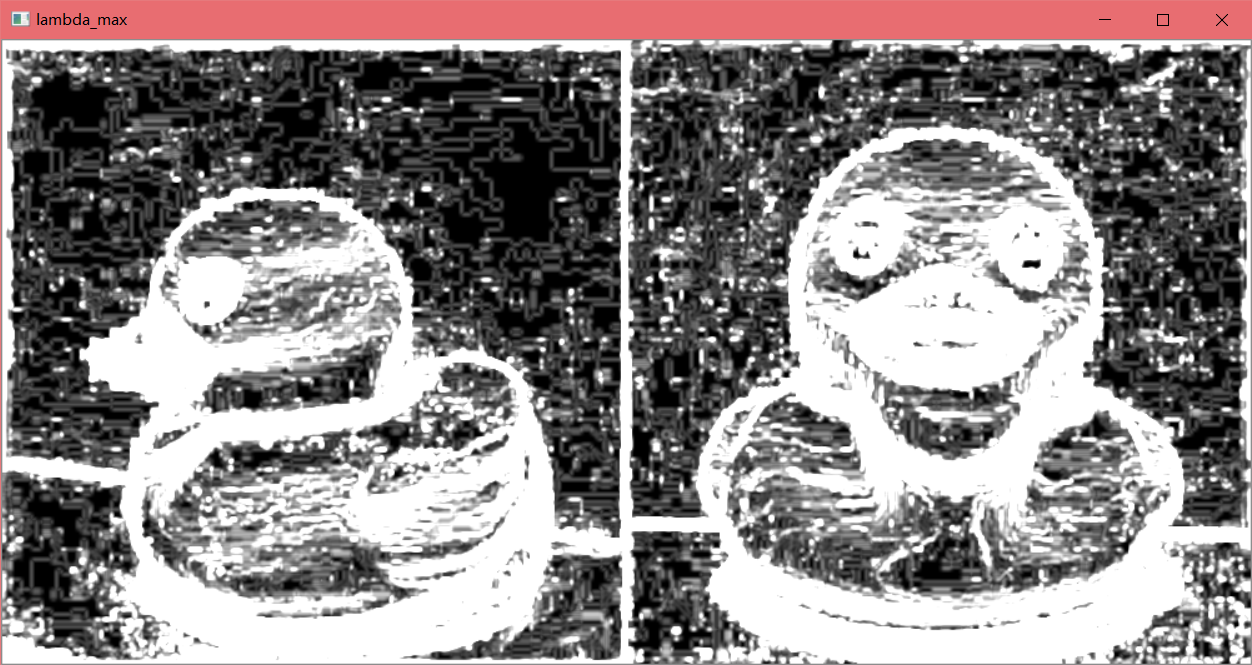
最大特征值图
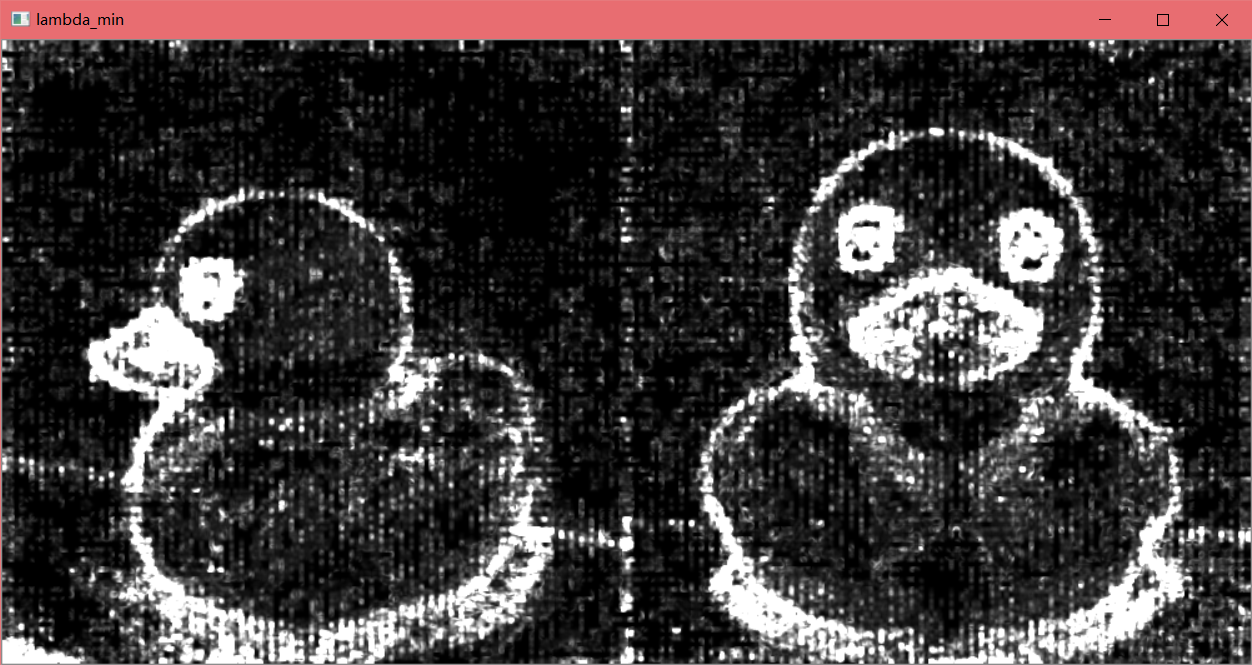
最小特征值图
R图
由于发现在图片中各处R值大多分布在两端,因此用彩色显示效果并不好,在这里只做灰度显示
设置阈值前:
设置阈值后:
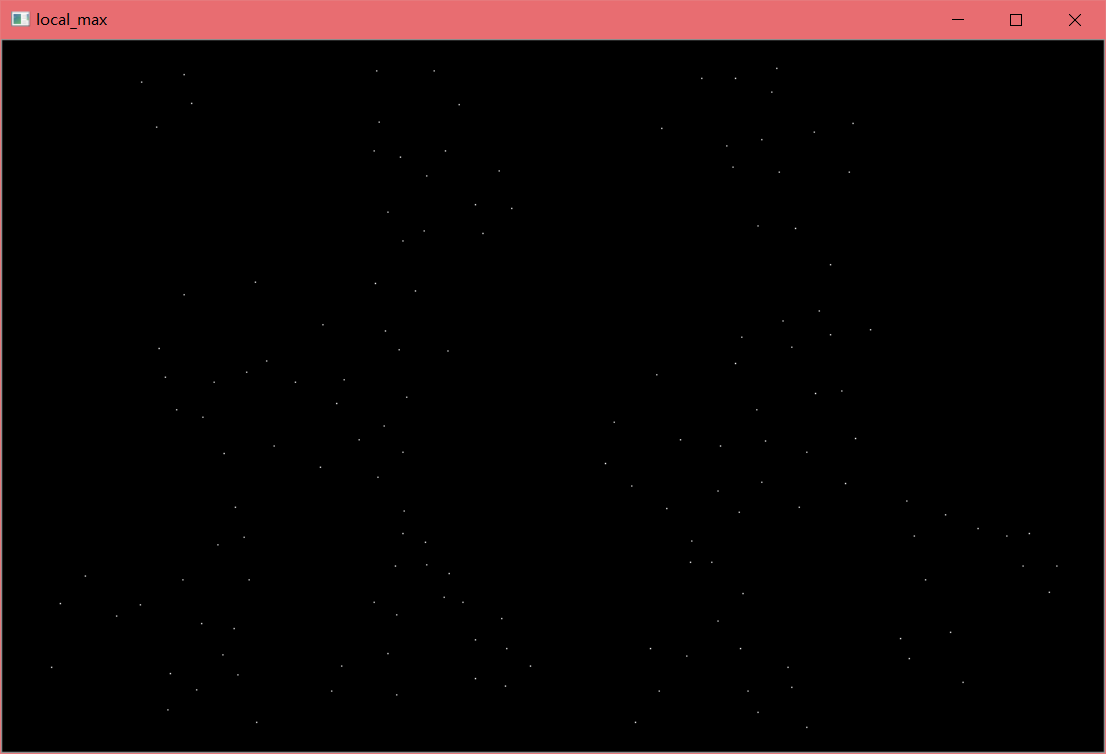
局部最大值
原图覆盖显示