已实现的功能简述及运行简要说明
功能简述
对输入的多张彩色图像,可以自动拼接成全景图像,同时对拼接边缘部分进行融合处理。
运行简要说明
img1,img2,… 存储读取图像的路径,生成的全景图像将在result窗口中显示,并存储为result.jpg在与代码相同目录下。
开发与运行环境
操作系统:Windows 10,64位
开发环境:Python 3.7.3
库环境:numpy 1.16.4, cv2 3.4.2
算法基本思路、原理
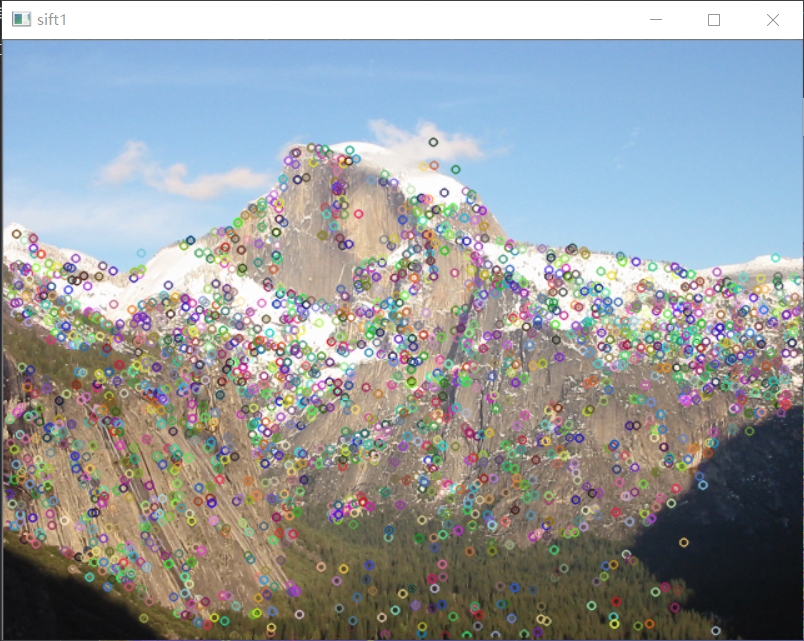
SIFT特征提取
SIFT即Scale Invariant Feature Transform,尺度不变特征变换。主要包含尺度空间的极值检测、特征点定位、特征方向赋值、特征点描述四个步骤。
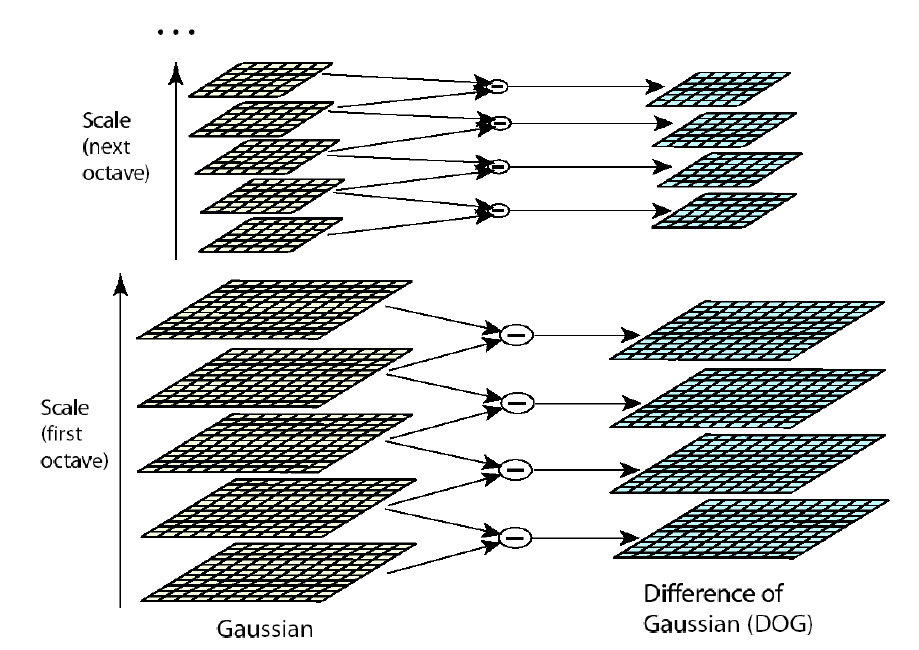
首先由不同高斯卷积得到图像的高斯尺寸空间

其中,$G(x,y,σ)$是高斯核函数,$σ$代表尺度空间因子,是高斯正态分布的标准差,反应了被模糊的程度,其值越大,模糊程度越高,尺度也就越大。$L(x,y,σ)$代表高斯尺度空间,构建好后就可以检测出在不同尺度下的特征点。特征点的检测可以使用LoG算子,但是LoG的运算量过于大,通常使用的DoG,即差分高斯。

DoG是由两个相邻的高斯空间图像相减得到的。所以需要得到一系列的高斯空间尺度,可以在对图像平滑和向下取样得到结果的基础上加上高斯滤波,即对向下取样的每层图像使用不同的尺度空间因子$σ$进行模糊。通过这样的方式,通过相邻两层相减就可以得到DoG的集合。
为了寻找尺度空间的极值点,每个像素点要和其图像域(同一尺度空间)和尺度域(相邻的尺度空间)的所有相邻点进行比较,当其大于(或者小于)所有相邻点时,该点就是极值点。
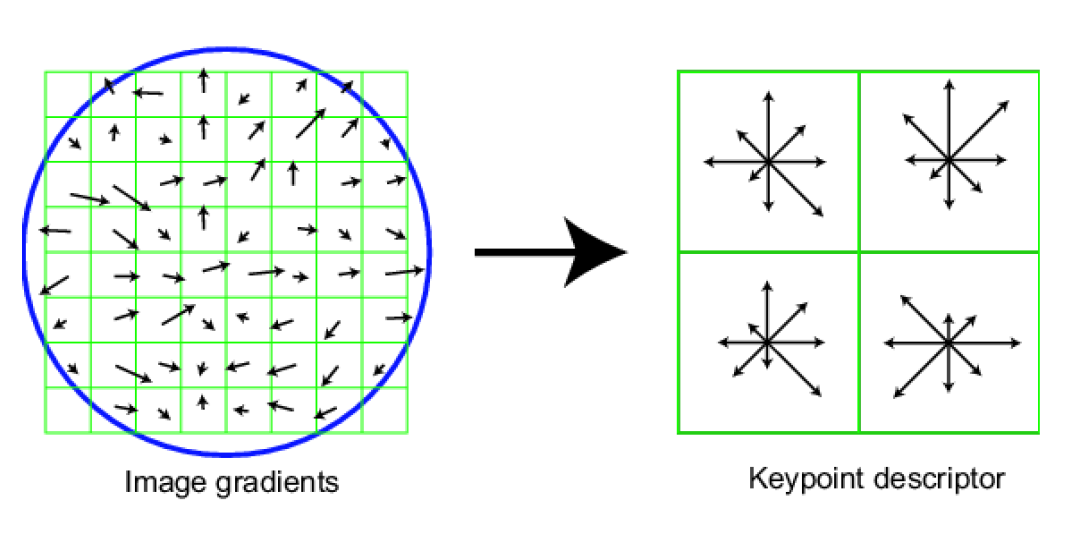
利用特征点邻域像素的梯度分布特性来确定其方向参数,再利用图像的梯度直方图求取关键点局部结构的稳定方向。
特征点匹配
通过K邻近算法将之前使用SIFT算法得到的特征点以及相应特征描述进行匹配。使用KNN算法找到最近邻的两个数据点,如果这两个点的距离比值小于指定的值,那么我们就可以认为这两个点是最接近的,并认为这两个点是好的匹配点加入到我们的列表中。
图像变换
通过Homography矩阵进行图像变换。使用之前得到的匹配点计算Homography矩阵。通过矩阵的表达式可以看出,需要求解这六个未知数需要用到三对匹配点。而这些点的选择将通过RANSAC算法来进行。
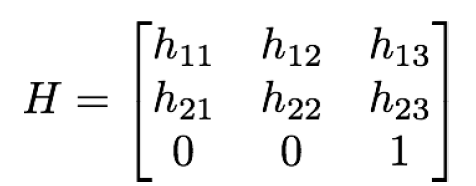
RANSAC算法即随机抽样一致算法(Random Sample Consensus)。将从数据中随机选择的点定位内点,拟合模型,然后将其他点带入模型中,如果Loss在指定阈值之内,则将这些点标为内点。如果内点数量足够多则可以认为模型比较理想。重复以上步骤得到最理想的模型。
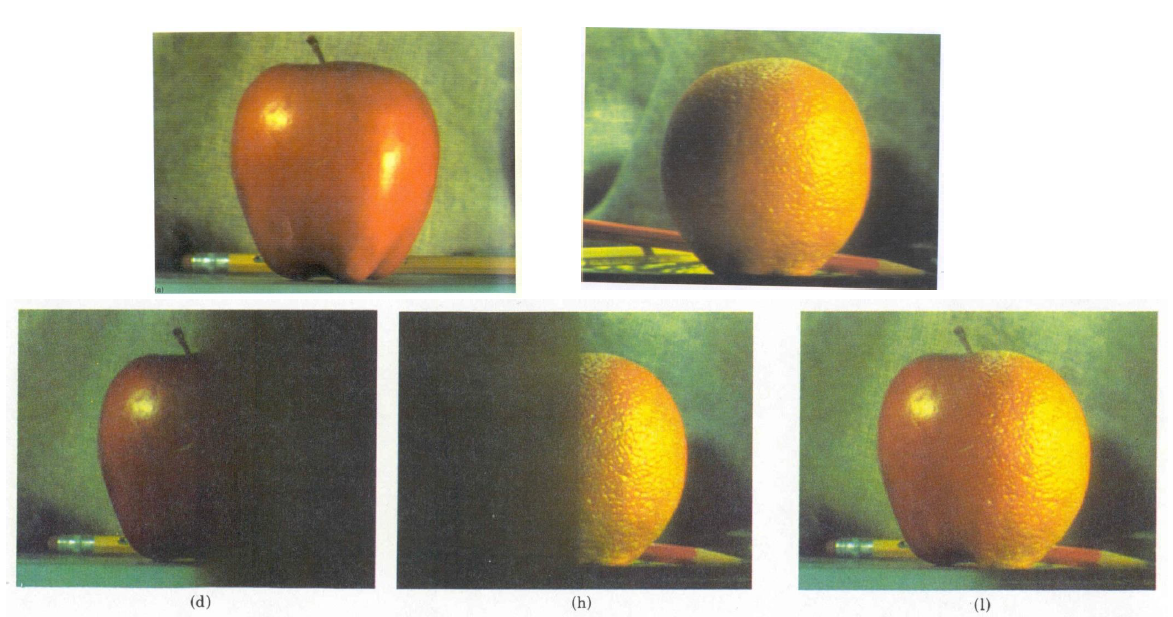
图像融合
一种图像融合的方式是,使用高斯金字塔和拉普拉斯金字塔,对尺寸相同但是内容不同的两张图片进行无缝连接。算法及示例如下:
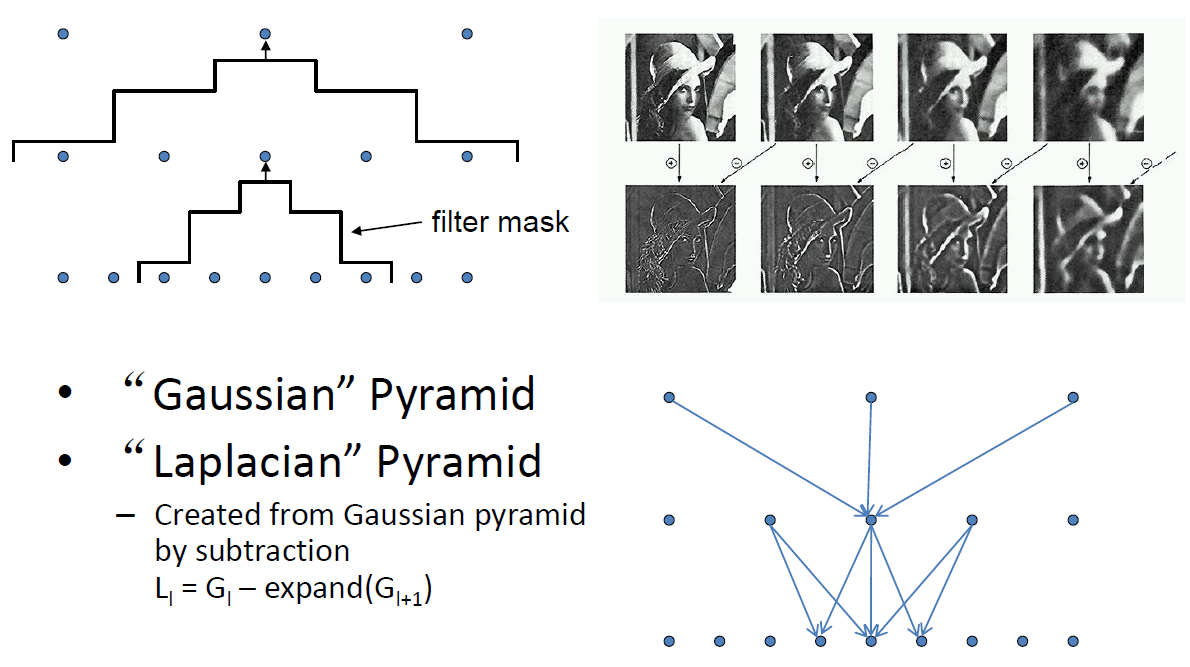
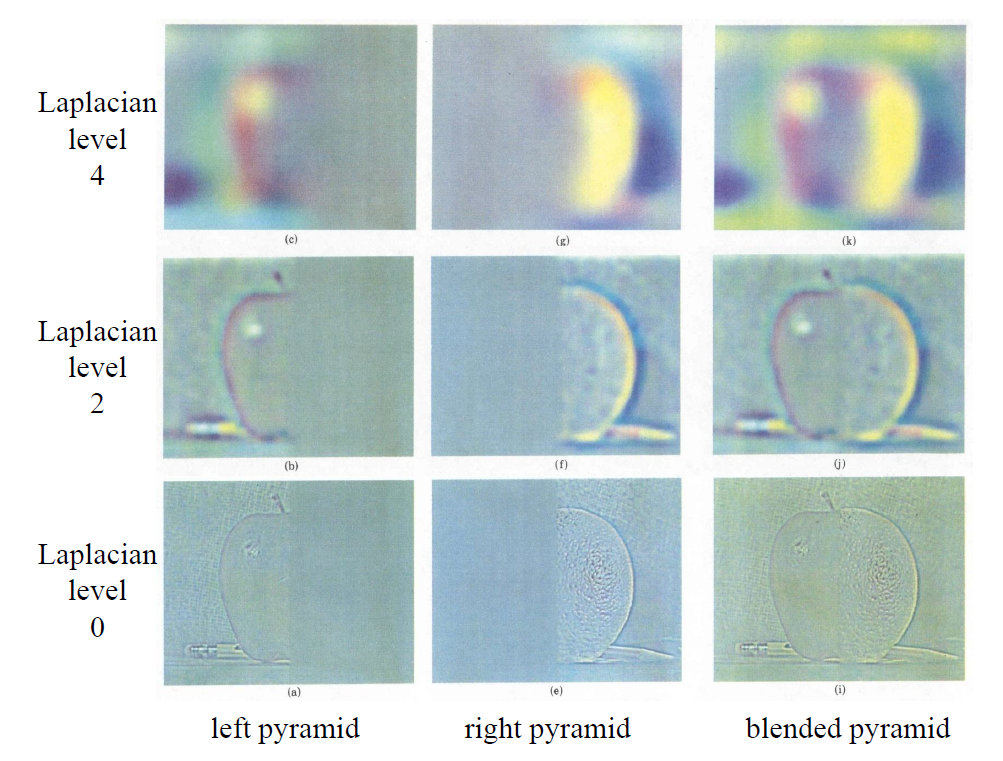
在本项目的实现,即全景图片的拼接中,由于拼接部分内容相似,只是可能存在色差等问题,因此采用更为简便的方法。即根据当前像素点与待融合部分左边缘的距离,选择递增的权重,在待融合部分进行渐变显示。
$$
output\,[i,\,j] = img_left\,[i,\,j] \times (1-\alpha) \; + \; img_right\,[i,\,j] \times \alpha
$$
$$
\alpha = \frac{j-leftend}{rightend-leftend}
$$
具体实现
特征提取
直接调用opencv中的SIFT相关函数进行特征匹配,实现方式如下:
1 | def sift_compute(img): |
特征点匹配
调用knnMatch函数进行特征点匹配,如果距离相近,则认为是好的匹配
1 | bf = cv2.BFMatcher() |
图像变换
调用函数,利用RANSAC算法计算Homography矩阵,并进行图像变换
1 | #fitting transformation |
图像融合
将位于左边的图片作为要叠加的图片,位于右边的图片(之前进行变换的图片)作为被叠加的图片。为了除去黑色边缘,检测左边图片的像素点,若不在黑边区域则进行显示,否则不显示。此外,若检测得到当前位置为两张图片的重叠区域,则进行融合处理。
1 | #blending |
显示处理
去除拼接后图像空白的部分
1 | rows, cols = np.where(imgIn[:,:,0] !=0) |
实验结果与分析
yosemite-test
特征点图
特征点匹配图

Homography图像变换
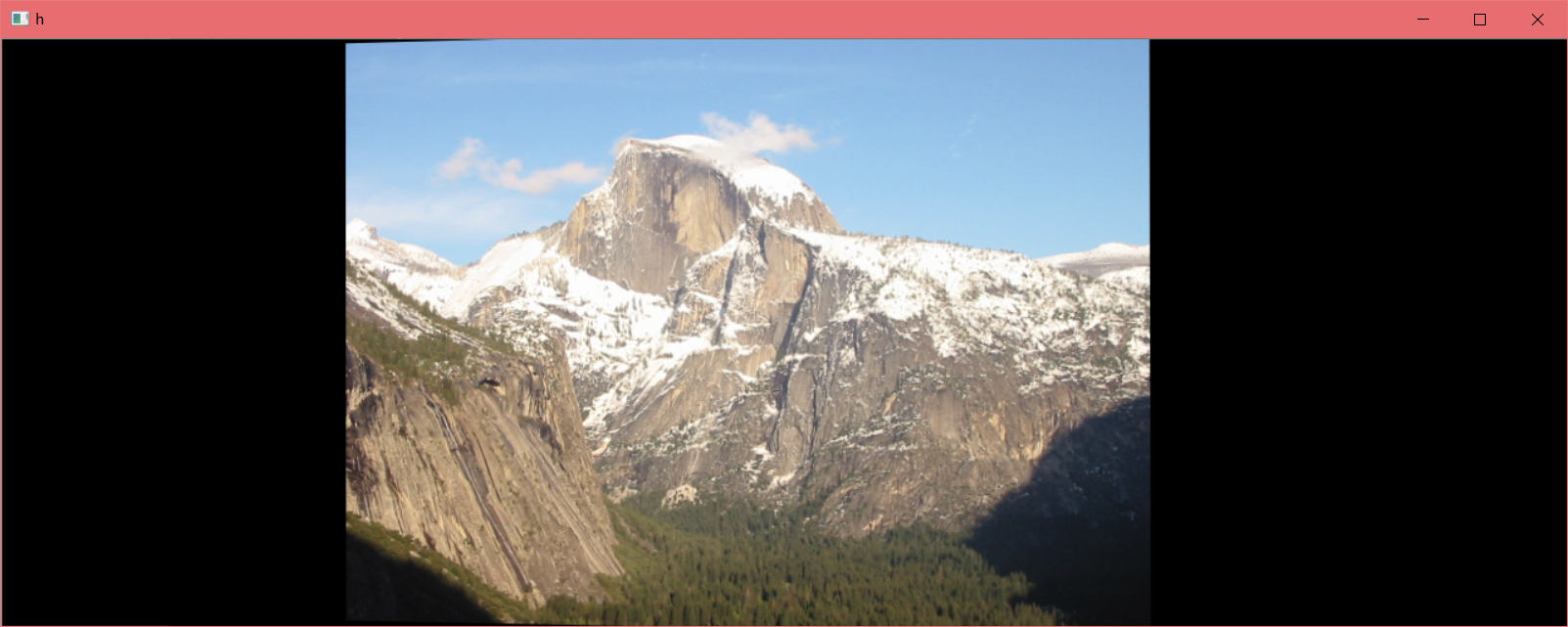
最终拼接结果

其他测试图
使用自己拍摄的图像进行拼接,结果如下:

可以看出来结果不尽如人意。分析原因可能有以下几点:
- 使用手机进行拍摄,在拍摄时就可以发现,镜头边缘变形非常严重,这可能导致了在图像进行拼接时,由于边缘变形导致Homography矩阵出现偏差,这种变形进行累加将导致待拼接的图像数量越多,整体变形越严重
- 在本项目的拼接处理中,以最左边的图片作为基准,对其他图片进行变换并融合叠加,这在一定程度上加大了最右边图像所需要做的变形。猜测如果以最中间图片作为基准,对两边图片进行变换,将会有更好的效果
为了验证以上两点猜想,用手机全景照相功能拍摄了一张全景图像,裁剪成多张图片之后再进行拼接,得到结果如下:
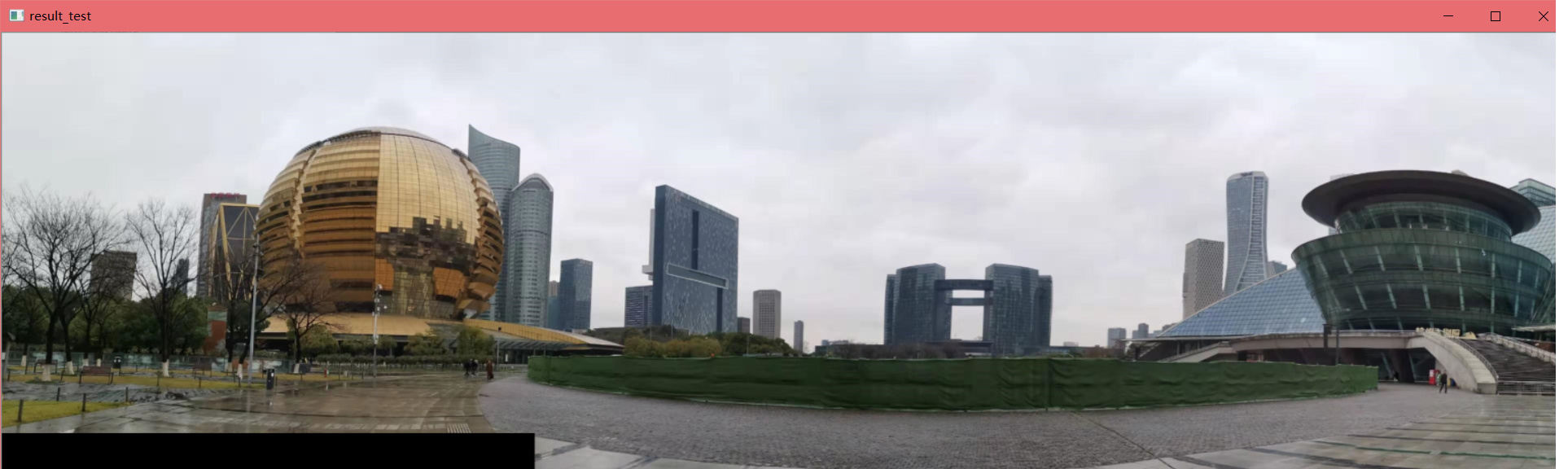
可以看出来效果符合预期,说明之前不符合预期的情况确实可能是由于以上原因。